
Multistatic STAP
Multistatic radar can provide improved performance against stealth targets and electronic countermeasures, and can provide protection against attack through the use of standoff transmitters. Due to these benefits, multistatic radar has been a popular area of research at several times in the last few decades. Currently, the deployment of sensors on unmanned air vehicles (UAV's) are again making multistatic radar systems and signal processing an interesting field of study.
In this project, we are looking at space-time adaptive processing (STAP) deployed across multiple airborne platforms. In this scenario, multiple airborne-based radar systems observe the same target area. Each airborne platform has a multi-channel receiving system; therefore, each platform collects space-time data. In some cases, we assume the platforms observe reflections due only to their own transmitted signal. In other cases, we assume that each platform can observe and separate the signals due to many different transmitters. This last approach is also known as MIMO radar.
We investigate the improvement in SINR and detection probability realized by combining the space-time data from multiple airborne radar sensors. We have looked at optimum, known-interference cases as well as the case were interference statistics must be estimated from training data. Recently, we have characterized the performance of multistatic extensions to the single-platform GLRT and adaptive matched filter (AMF). We have also noted that for fluctuating targets, multistatic STAP provides a diversity gain similar to what is experienced in wireless communication systems. In wireless communication, diversity order is defined as the asymptotic slope (as transmit SNR goes to infinity) of a plot of outage probability versus transmit SNR. We observe the same asymptotic effect when plotting probability of miss versus average SNR. Received SNR from a target, however, also depends on the target's velocity vector and the radar geometry. This geometry-dependent factor causes a shift in the probability of miss curve, which we have called the geometry gain of multistatic STAP. These effects occur for CFAR adaptive detectors as well.
Figure 1 below shows an example of detection performance for a three-platform multistatic system versus target velocity. If only one radar were used, there would be a deep notch in detection performance whenever the target is moving perpendicular to the radar system. With a multistatic system, this notch only occurs when the target's absolute velocity is nearly zero. Note that the detection performance depends on how many platforms can separate the target from ground clutter using the target's Doppler shift. This hints at the geometry gain effect discussed above.
Figure 2 shows examples of the asymptotic slope of the probability of miss curve parameterized by the number of independent sets, K, of space-time data. Figure 3 demonstrates geometry gain for several different three-platform systems having different geometries. Note that geometry controls how high target average RCS must be before the asymptotic slope is obtained.
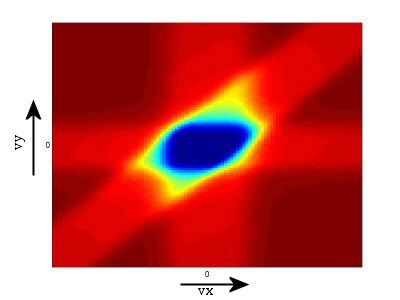
Figure 1. Image of PD versus target velocity components.
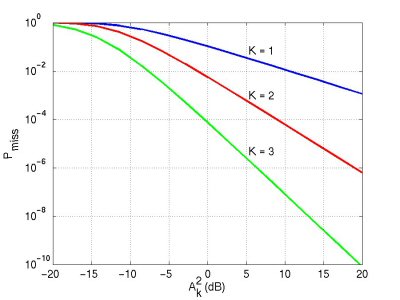
Figure 2. Asymptotic Pmiss performance versus SNR. Parameterized by number of radar platforms.
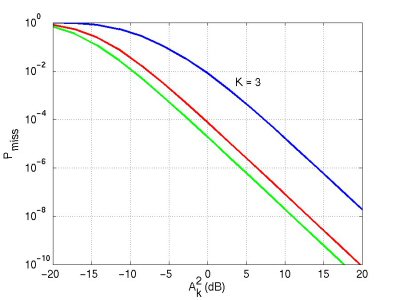
Figure 3. For the same number of platforms, geometry controls the shift in the asymptotic curves.